ไทย
EN
ปัญหาเสียงดังจากยานพาหนะ เครื่องมือ เครื่องจักร ในโรงงานอุตสาหกรรม และการก่อสร้างต่างๆ ก่อให้เกิดผลกระทบต่อสุขภาพทั้งทางร่างกายและจิตใจของผู้ที่อยู่ใกล้เคียง
วิธีการแก้ไขแบบหนึ่งคือ การใช้วัสดุดูดซับเสียง ซึ่งปัจจุบันมีหลากหลายชนิด ไม่ว่าจะเป็น โพลีเอสเตอร์ เยื่อกระดาษ ใยแก้ว ใยไม้ ใยหิน เป็นต้น แต่พบปัญหาการใช้งานบางอย่าง เช่น หนา หนัก ไม่แข็งแรง เสื่อมสภาพง่าย ไม่ทนไฟ เป็นพิษ หรือดูดซับเสียงไม่ได้ตามต้องการ
โฟมอะลูมิเนียม
โฟมอะลูมิเนียม เป็นวัสดุที่มีคุณสมบัติในด้านการดูดซับเสียงดี แข็งแรง ทนแรงกระแทก น้ำหนักเบา สวยงาม ไม่ลุกติดไฟ ไม่เป็นพิษต่อสิ่งแวดล้อม และสามารถนำกลับมาใช้ใหม่ได้ โฟมอะลูมิเนียมมีการผลิต จำหน่ายและใช้งานในต่างประเทศ แต่ปริมาณยังไม่มากนัก เนื่องจากมีต้นทุนวัตถุดิบและการผลิตสูง
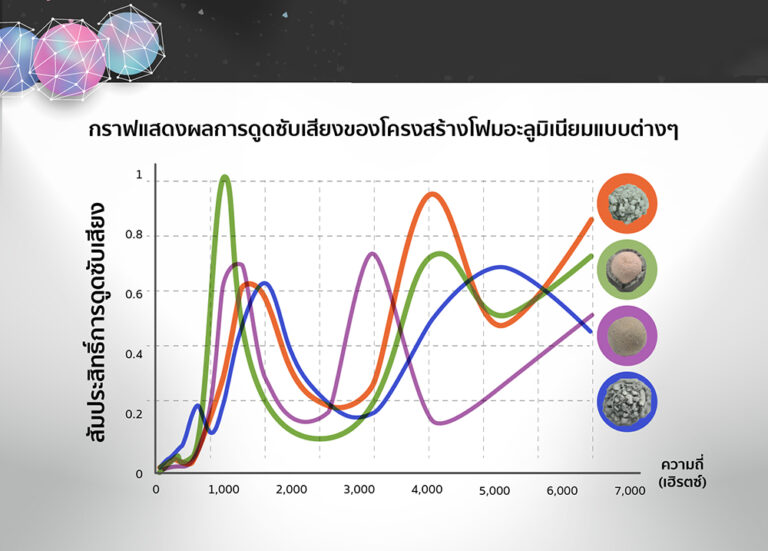
นักวิจัยจากห้องปฏิบัติการโลหะวิทยาขั้นสูง หน่วยวิจัยโลหะ ศูนย์เทคโนโลยีโลหะและวัสดุแห่งชาติ สวทช. พัฒนาโฟมอะลูมิเนียมที่มีคุณสมบัติเด่น คือ ดูดซับเสียงที่ความถี่เสียงต่างๆ ได้ตามความต้องการของผู้ใช้งาน
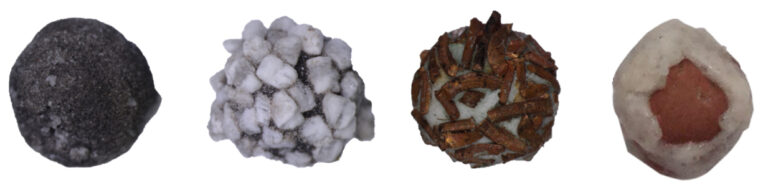
วิธีการผลิตที่นักวิจัยคิดค้นขึ้นใหม่ ใช้วัสดุทรงกลมซึ่งสามารถทนอุณหภูมิสูง และมีพื้นผิวรูปแบบต่างๆ เป็นวัสดุที่ทำให้เกิดรูพรุนรูปแบบต่างๆ ภายในโฟมอะลูมิเนียม วิธีการดังกล่าวมีต้นทุนการผลิตต่ำกว่าแบบเดิมถึง 50 % ช่วยลดการนำเข้าจากต่างประเทศได้อีกด้วย
วัสดุทรงกลมรูปแบบต่างๆ
ผลิตภัณฑ์นี้สามารถใช้กั้นเสียงที่เกิดจากโรงงาน สถานที่ก่อสร้าง งานจราจร เพราะมีความทนทาน และใช้ลดเสียงจากชิ้นส่วนภายในเครื่องใช้ไฟฟ้า รวมทั้งใช้เป็นแผ่นดูดซับเสียงภายในอาคาร มีคุณสมบัติไม่ติดไฟ และไม่เป็นพิษต่อผู้อยู่อาศัยได้อีกด้วย
ขนาด พื้นผิวและรูปแบบของรูพรุน
ขณะนี้อยู่ระหว่างทดสอบการใช้งานจริงร่วมกับภาคอุตสาหกรรมและได้ดำเนินการถ่ายทอดเทคโนโลยีการผลิตวัสดุทรงกลมให้แก่บริษัทเอกชนจำนวน 1 บริษัท